1、液体膨胀型自力式温度调节阀工作原理与阀芯的受力分析
常见的液体膨胀型自力式温度调节阀结 构主要由阀体1、阀座2、阀芯3、弹簧组件4、阀芯推杆6、波纹管组件 7~9、刚性毛细管10、温度传感器11、12、温度设定旋钮13、温度设定显示14以及过温保护装置等构成。如图1a所示。推动阀杆动作的压力信号由传 感器11中的填充感温液体介质的膨胀产生,并通过刚性毛细管10将压力信号传递至平衡波纹管腔室。作用在阀芯上的上部流体的压力和下部流体的压力以及弹簧 力都通过波纹管内液体感温介质产生的力来平衡,其结果是推动力FA和预置弹簧的弹力FF的方向相反,但大小相同。二力在等流量状态下平衡。当温度在测量点 基础上上升或下降时,自力式温度调节阀的控制与执行系统可减少或增大流量。
温度调节的过程如下:
(1)当传感器所测的介质温度升高时,传感器内的填充物膨胀并施加驱动力FA在阀件上。
(2)当FA大于预设弹簧力FF,后阀门的开度变小,通过阀门的流体流量减少。
(3)流量减少后,温度降低,直至达到新的力平衡状态,此时,阀体到达新位置。如图1b所示
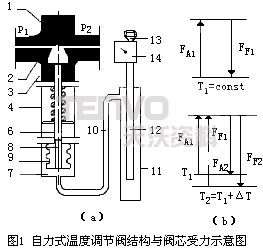
由上面对阀芯的受力分析可得:
FA=pAB-(P1-P2)Av-k1X=FF=k2x (1)
:pAB-(P1-P2)Av=k2x+k1X=kx (2)
式中:AB为波纹管的横截面积;p为感温介质产生的膨胀力;p1为自力式温度调节阀使用中阀前压力;p2为自力式温度调节阀使用中阀后压力;AV为阀芯的横截面积;k1为波纹管的刚性系数;k2为弹簧的倔强系数;k=k1+k2为波纹管与弹簧的总刚性系数;x为弹簧偏离平衡位置的位移。
由式(2)可见,在自力式温度调节阀设计中,分析温度传感器内感温介质随温度变化所产生的膨胀量和膨胀力是至关重要的。
2、液体膨胀型自力式温度调节阀温度传感器的内充液体容积的设计与分析
a、传感器的内充液体容积的设计与分析
当温度升高时,固体、气体和大多数的液体都会膨胀。图2表示为液体膨胀型自力式温度调节阀温度传感器原理:当温度升高时,传感器缸体内的液体就会膨胀,由于刚性缸体壁阻止了径向的膨胀,液体只能沿轴向膨胀,从而推动活塞和连杆向上运动。
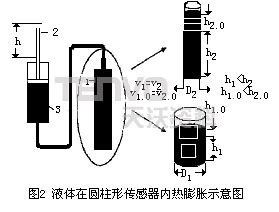
根据文献[3]可近似地应用简单液体与固体的简化状态方程:
V=V0[1+α(T-T0)-β(p-p0)] (3)
式中 α为等压体积膨胀系数;
β 为等温压缩系数;
P0 为温度为T0时液体的压力;
P为温度为T时液体的压力;
V为时液体的容积;
V0为T0时液体的容积。
等压体积膨胀系数α和等温压缩系数β都很小,在一定温度范围内为常数,可通过实验测出,也可查阅相关文献。p0则可由充装液体介质时确定,V0是在温度T0时传感器的容积,可取T0为充装温度即室温,则V0即可认为是感温传感器的内充液体容积。
传感器缸体的活塞测量填充液体的热膨胀量,其行程代表温度的函数。在自力式温度调节阀内,波纹管即为活塞,所以波纹管的行程变化量:
 (4)
(4)由式(3)可得:ΔV=V0[αΔT-β(p-p0)],代人式(4)得:
 (5)
(5)又由式(1),当弹簧平衡位置与波纹管初始位置相同时,x=Δh,则:
pAB=kx+(P1-P2)AV=k•Δh+(P1-P2)AV (6)
联立式(5)、式(6)得:
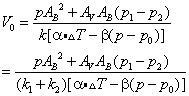 (7)
(7)或(8)
 (8)
(8)式(7)可以认为是在一定的温度和压力范围内传感器内充装液体容积V0与阀门结构尺寸(AV,AB)、阀门弹簧与波纹管刚性(k1,k2)、使用条件(p1)以及使用中可能出现的边界条件——极限情况(对应最大温度变化△Tmax 、阀后压力P2≈0和传感器内压力Pmax)的关系式。式(8)是波纹管行程代表温度的具体函数表达式,可见V0在确定、在一定的温度和压力范围内、一定使用条件情况下(即α,β,P1,k等都为常数,P2因阀开度变化产生的变化较小),Δh与ΔT成线形关系。这说明,为获取波纹管的某一行程量Δh ,需要考虑操作元件的形状能满足要求:通常较小横截面积AV, 传感器能产生比大横截面积传感器更大的行程量。当波纹管的行程量较大时,测量的温度范围较大,因而倾向于采用较小容积传感器以得到较大和较精确的测量结 果。但小容积传感器的缺点之一是传递的动力较小。因此,在设计传感器内充介质容积的时候,必须兼顾行程、温度的变化量以及所需动力的大小。
b、传感器填充液体类型的选择
为迅速、准确地将温度的变化量反应在上推杆行程上,从而调节阀门开度,传感器所吸收和散失的热量应尽量少。可通过较小的体积和质量满足此要求,但在体积确定的情况下也可以通过选择某种较低热容的填充介质来实现。贮存在感温传感器内充液体的热量的计算如下[4]:
W=cpmΔT (9)
式中cp为填充液体的比热,一般不是常量,而是随温度的变化而改变的,在一定温度范围内可近似为常数,可根据实验或相关文献查得;m为填充液体的质量;ΔT为温度的改变量。
自力式温度传感器一般采用丙三醇、甲醇、硅油等液体原料合成的合成油作为填充介质。除了液体,树脂和塑料类物质也能用作填充介质。在很小温度变化范围内, 膨胀性树脂特别适用于体积变化较大的场合。填充介质的选择同时要求填充液体无毒,不危害健康,不污染环境,如果万一发生泄漏,可同废水一起排放。
3、结论
液体膨胀型自力式温度调节阀是一种不需要任何外加能源的直接作用调节阀,实践使用中有着诸多优点。对液体膨胀型自力式温度调节阀关键部件—感温传感器的工 艺设计中,可以根据具体要求,依据上述讨论中的基本原理和相应介质的物性参数,综合考虑相关因素,计算内充介质的容积,选择相应介质。此外,可依据文献[1]的讨论与分析,设计感温传感器的结构型式与参数、推荐安装位置。




















